Il CRF (Centro Ricerche del gruppo Stellantis) ha partecipato a “C-Roads Italy: i sistemi cooperativi C-ITS al servizio della mobilità stradale diventano realtà”, la conferenza organizzata da Autostrada del Brennero che si è svolta presso il Centro Congressi Interbrennero a Trento. Questo progetto, realizzato con il Ministero delle Infrastrutture e dei Trasporti Italiano insieme ad altri partner, fa parte di una pianificazione più ampia co-finanziata dalla Commissione Europea. La conferenza ha presentato i risultati raggiunti dal progetto C-Roads Italy, congiuntamente alla piattaforma europea C-Roads, nel contesto italiano ed europeo.
Si è dato evidenza di ciò che è stato realizzato per lo sviluppo e l’implementazione di Cooperative Intelligent Transport Systems (C-ITS) armonizzati ed interoperabili che permettono la comunicazione tra i veicoli e con l’infrastruttura stradale delle Smart Roads in tutta Europa, comunicazione conosciuta anche come Vehicle-to-Everything (V2X).
L’iniziativa C-Roads Italy garantisce la continuità dei servizi cooperativi tra gli stati membri e gli operatori stradali, contribuendo a un sistema di trasporto sostenibile in termini di impatto economico, ambientale e sociale e, allo stesso tempo, migliorare la sicurezza stradale, aumentare l’efficienza dell’uso delle infrastrutture stradali e la gestione del traffico, migliorare l’interoperabilità dei servizi di trasporto sia per i passeggeri che per le merci.
Il CRF ha partecipato con Filippo Visintainer, responsabile del progetto con un intervento dal titolo “il contributo dei C-ITS per il futuro dei Sistemi di Assistenza alla Guida e di Guida Autonoma”.
Focus della presentazione sono stati i risultati della sperimentazione di particolari funzionalità innovative per la gestione dei veicoli connessi e autonomi (Highway Chauffeur) su cui si è concentrato il CRF allestendo prototipi di Maserati Ghibli e Fiat 500X. I test sono a tutt’oggi ancora in corso presso il CRF di Trento, sulle tratte autostradali della A22 presso Trento, sulla tangenziale di Venezia, su tratte della A4 e A28, oltre che presso il Brennero per scenari transfrontalieri Italia-Austria.
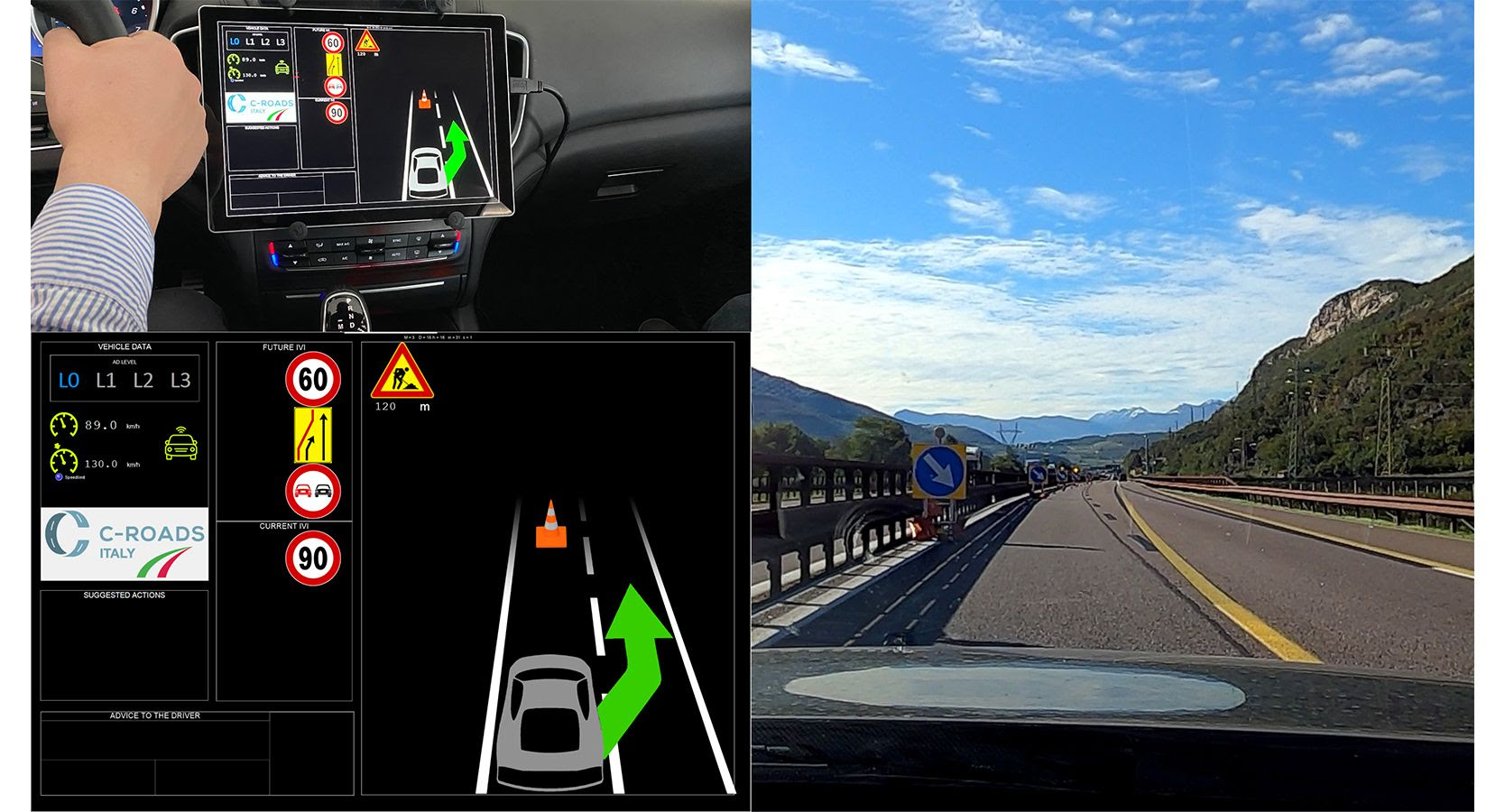
Highway Chauffeur (Livello 3 – SAE) è la funzionalità di automazione dei veicoli che permette di regolare la velocità, mantenere la traiettoria ed effettuare il cambio corsia in modo automatico. L’obiettivo principale dell’attività di CRF è quello di testare, verificare e dimostrare, in conformità con gli obiettivi di armonizzazione della Piattaforma C-Roads, come i sistemi cooperativi Vehicle to Vehicle (V2V) e Vehicle to Infrastructure (V2I) possano avere un impatto positivo sulla sicurezza, sulla fluidità del traffico e sull’ambiente. Il focus è la comunicazione V2I, ossia tra i veicoli e la rete stradale intelligente, le cosiddette Smart Roads, in modo che l’Highway Chauffeur a guida autonoma SAE L3, possa sfruttare le informazioni provenienti dall’esterno per migliorare la conoscenza dello scenario in cui si muove, per una guida autonoma sicura e confortevole. Tali informazioni sono anche rese disponibili in guida manuale, come consigli di cambio corsia o sistemi di allerta. I messaggi V2X sono geo-referenziati, in modo tale che il veicolo possa filtrarne il contenuto in base alla propria posizione e traiettoria.
Nel set-up preliminare un sistema di laboratorio in CRF permetteva di replicare i dati raccolti su autostrada e li fornisce in ingresso alle centraline veicolo. In questo modo, i dati di manovra e comunicazione raccolti dall’auto connessa sulle aree di test sono stati riutilizzati in laboratorio per raffinare gli algoritmi delle centraline e prepararsi quindi l’allestimento a bordo veicolo a supporto di una mobilità sempre più sicura e confortevole. La tecnologia V2X è stata poi integrata e testata con veicoli prototipali che implementano l’Highway Chauffeur. Grazie all’infrastruttura del progetto, il veicolo riceve notifiche di eventi come lavori in corso, veicolo fermo, traffico intenso, meteo avverso, segnaletiche dinamiche (velocità), presenza dei caselli.
Inoltre, grazie agli altri veicoli cooperativi, l’auto riceve la presenza e i dati di manovra (velocità, accelerazione, imbardata, indicatori di direzione, etc.) di tutti i veicoli vicini equipaggiati dal V2X, inclusi eventi critici come veicolo fermo e in panne.
I sistemi prototipali sulle vetture cooperative sono stati sperimentati in una serie di casi d’uso, che vanno dalla segnalazione di eventi stradali imprevisti, agli scenari cooperativi tra auto passeggeri, agli scenari più complessi di manovre cooperative tra auto passeggeri e mezzi pesanti in condizioni eccezionali, quali il restringimento corsia per lavori in corso.